鹿児島大学 人工衛星開発チーム
鹿児島大学 人工衛星開発チーム深宇宙実験機 しんえん2
ミッション内容
①月軌道周辺にある超小型宇宙機との通信技術獲得
月周回軌道上に月面探査ロボットを投入する技術、月サンプルリターン技術などの
月ミッション実現のための基礎技術の獲得を目指すものである。
例えば、月軌道上にある探査ロボットなどを動作させることを想定し、所定の距離
に達した時に地上からスケジュールプログラムを送り宇宙機に記憶させた後、スケジ
ュールを起動してスケジュールに従った動作を行わせ、動作結果を地上に送り返す。
また、月面反射通信のノウハウを応用し、深宇宙での宇宙機の動作状態の確認を行う。月
軌道付近までは、アマチュア無線業務に供する宇宙機搭載通信装置(トランズポンダ
ー系通信装置)を用いて広くアマチュア無線局による相互通信を行う。宇宙軌道以遠
では、宇宙機から送信されるテレメトリデータおよびモールス信号によりできるだけ
遠距離での信号検出実験を行う。

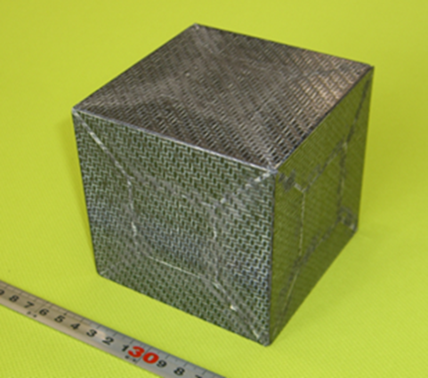
②新しい軽量衛星構造の開発技術の構築
金属材の溶接と同様に複合材を溶着接合できる炭素繊維強化熱可塑樹脂CFRPを世 界で初めて宇宙利用する。このCFRP を用いることでボルトやリベットなどの金属フ ァスナー使用を劇的に減らすことができる。これにより、衛星の軽量化、構造信頼度 の大幅向上を実現できる。また、「ほどよし衛星」の研究成果を積極的に活用するもの でもある。 実験機は熱収支がシンプルとなる直径約500mm の準球形とし、北赤道付近に4 本の 伸展アンテナを艤装し、全面を太陽電池で覆うことで必要電力を確保する。