 電子制御研究室
電子制御研究室
鹿児島大学/工学部/電気電子工学科/電子制御研究室|倒立振子
電子制御研究室
倒立振子の振り上げ制御について,画像を交えて実験の様子を紹介します.
倒立振子(とうりつしんし)は,その名の示すように,普通の振り子(下向き)を逆
立ち(倒立)させたものです.振り子と言っても,ヒモとオモリでは逆立ちさせられ
ないので,しっかりとした形のあるものを振り子として用います(以下の実験では,
細長い金属板を使用しています).倒立振子は,制御の理論を実験的に検証するとき
に,好んで用いられる題材の一つです.
倒立振子の制御を理解するために,「手のひらの上で棒をたてる」という遊びを思い
浮かべてみましょう.手のひらの上の棒というのは,倒立振子そのものです.手のひ
らの上の棒は,逆さにまっすぐ立てておいても,そのまま何もしないと自然と倒れて
しまいます.倒れないようにするには,手を動かして,常に棒をまっすぐな状態にし
ておかなければなりません.倒立振子の制御もこれと全く同じで,手のひら代わりの
台車をうまく動かして,倒立振子が倒れないようにしています.
実際に人が棒を立てようとするときには,手の平を空間的(3次元的)に動かします
が,機械を使った実験で同じことをやるのは非常に大変です.このため,実験では,
1方向にしか倒れないような振り子を,その方向(1次元的)にしか動けない台車に
固定しています.
倒立振子の振り上げとは,下向きの振子を揺さぶって,逆立ちの状態まで持っていく
ことです.器械体操の大車輪の様子を思い浮かべると分かりやすいかもしれません.
振子を揺さぶって逆立ちの状態までもっていった後は,倒れないように倒立振子の
制御を行います.
それでは,実際に実験の様子を見ていきましょう.
 |
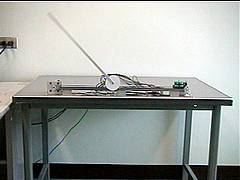
始めの状態 振子は下向きになっています. この画面には映っていませんが,制御はコンピュータのプログラムで行われています. |
 |
振り上げの途中1 振子を乗せた台車がレールの端まで画面右方向に移動し停止したため,振子は慣性により右方向に振り上げられています. |
 |
振り上げの途中2 台車がレールの上を2往復した直後.この後,振子は倒立状態へ. |
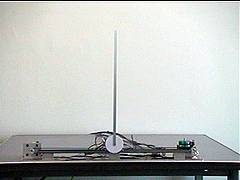 |
倒立状態 この状態では,振子が倒れないように台車が小刻みに移動しています. |
このページの内容に関する質問・意見等はこちらへお願いします.